自动驾驶软件架构中的基础服务层 挑战、关键组件与演进路径
自动驾驶系统的研发是一场融合感知、决策与控制的高度复杂的系统工程,其成败在很大程度上取决于底层软件架构的健壮性与灵活性。其中,基础软件服务层作为整个软件栈的基石,承担着连接硬件、管理资源、保障安全与实现高效通信的核心职能。在实际研发过程中,这一层的设计与实现面临诸多严峻挑战,同时也孕育着关键的技术创新机遇。
一、核心挑战:从异构到实时的多重约束
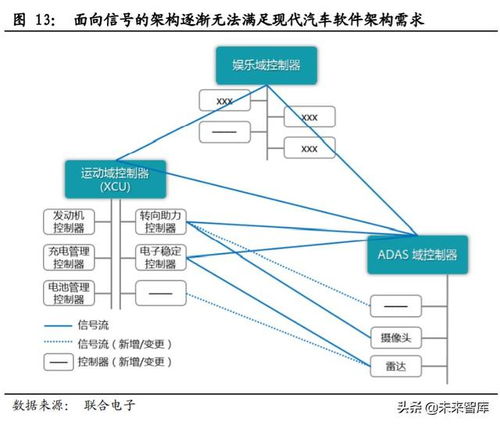
- 硬件异构性与抽象难题:自动驾驶系统通常集成多种传感器(如激光雷达、摄像头、毫米波雷达)、异构计算单元(如CPU、GPU、NPU)以及复杂的车辆线控底盘。基础软件服务层必须提供统一的硬件抽象层,屏蔽底层硬件的差异,为上层应用提供稳定、一致的接口。不同厂商的硬件在性能、接口协议、驱动模型上差异巨大,实现高效、低延迟的抽象是一大挑战。
- 确定性与实时性保障:与通用计算系统不同,自动驾驶对任务的执行时序有严格的确定性要求。从传感器数据采集、融合到决策指令下发,必须在极短且可预测的时间窗口内完成。基础软件服务中的操作系统(通常是实时操作系统RTOS或基于Linux的实时化改造)、中间件及调度器,必须确保关键任务不被延迟,这对中断处理、任务调度、内存访问等提出了苛刻要求。
- 安全与可靠性的至高准则:功能安全标准(如ISO 26262)要求软件架构具备从硬件到应用层的系统化安全机制。基础软件服务需要实现包括内存保护、故障检测与隔离、健康监控、安全启动、冗余通信等在内的多重安全机制。如何在满足安全要求的不牺牲过多的性能与灵活性,是架构设计中的核心矛盾。
- 数据与通信的庞大规模:传感器每秒产生数GB的原始数据,各模块间需要进行高频、低延迟的通信。基础软件服务中的通信中间件(如DDS、SOME/IP、ROS2)必须支持高效、可靠、可配置的数据分发,同时处理节点动态上下线、服务质量(QoS)管理等问题。数据序列化/反序列化的效率、网络带宽的优化都至关重要。
二、关键组件与架构模式
一个典型的自动驾驶基础软件服务层通常包含以下核心组件,并常采用“中间件中心化”或“服务化”的架构模式:
- 操作系统与内核:提供底层的任务调度、内存管理、设备驱动框架。QNX、VxWorks等传统RTOS在安全关键领域仍有应用,而基于Linux的实时化方案(如PREEMPT_RT补丁)凭借其丰富的生态和灵活性,正获得越来越多的青睐。AUTOSAR Adaptive Platform则是面向高性能计算的新型标准框架。
- 系统框架与中间件:这是基础软件层的“粘合剂”。
- 通信中间件:如ROS2(基于DDS)、CyberRT(百度Apollo)、Apex.OS等,提供了基于发布/订阅或服务调用范式的分布式通信能力,并集成了节点发现、QoS策略、数据记录与回放等工具。
- 数据与计算框架:管理传感器数据的流水线处理,优化数据在CPU、GPU、加速器之间的流动,减少不必要的拷贝与同步开销。
- 服务管理框架:实现模块的松耦合,支持动态配置、生命周期管理、服务发现与依赖注入。
- 硬件抽象与虚拟化:
- 传感器抽象层:统一不同型号传感器的配置、校准、数据采集接口。
- 执行器抽象层:将决策模块输出的控制指令,转换为具体车辆线控系统(如转向、制动、油门)能理解的协议。
- 计算资源抽象:通过容器化或轻量级虚拟化技术,在共享的硬件平台上为不同安全等级、不同供应商的软件组件提供隔离的运行环境,实现硬件资源的灵活分配与安全隔离。
- 核心系统服务:
- 时间同步服务:确保分布式系统中所有节点拥有统一、高精度的时间基准(如基于PTP协议),这对传感器融合和事件排序至关重要。
- 日志与诊断服务:记录系统运行状态、关键事件和故障信息,支持远程监控、问题复现与大数据分析。
- 安全监控服务:持续监控系统健康度,执行看门狗、心跳检测,并在检测到故障时触发预定义的降级或安全处置策略。
- 配置管理服务:支持车辆软件参数的在线更新与动态配置,适应不同的车型、地域或驾驶模式。
三、演进趋势与未来展望
随着电子电气架构向“中央计算+区域控制”演进,以及软件定义汽车理念的深入,自动驾驶基础软件服务层呈现出以下发展趋势:
- 标准化与开源协同:AUTOSAR Adaptive、ROS2等标准与开源框架的生态日益成熟,降低了开发门槛,促进了供应链协作。厂商在采用标准框架的也会在核心性能与安全模块上构建自身的差异化竞争力。
- 面向服务的架构深化:SOA理念被广泛采纳,将功能拆分为可复用、可独立部署和升级的“服务”,通过标准接口通信,极大地提升了软件的可维护性、可扩展性以及OTA升级的灵活性。
- 混合关键性系统集成:在同一硬件平台上,如何同时运行安全等级要求极高的控制程序(ASIL-D)和生态丰富的智能应用(如娱乐系统),需要基础软件提供强大的时空隔离能力。混合关键性系统调度与虚拟化技术是关键。
- 数据驱动与AI赋能:基础软件层不仅服务于感知和决策算法,其本身也在变得更加智能。例如,利用AI优化任务调度策略、预测系统负载、实现异常行为的智能检测与自愈。
总而言之,自动驾驶的基础软件服务层绝非简单的“底层支持”,而是决定系统上限的关键赋能层。它需要在严苛的约束下,平衡性能、安全、成本与开发效率。未来的竞争,不仅是算法的竞争,更是软件架构,特别是基础软件平台综合能力的竞争。持续投入于这一领域的创新与夯实,是构建安全、可靠且可进化的自动驾驶系统的必由之路。
如若转载,请注明出处:http://www.junyou666.com/product/64.html
更新时间:2026-06-19 21:15:55